CompactRIO 하드웨어는 리얼타임 기능이 있는 센서 또는 프로토콜별 컨디셔닝 I/O 모듈을 사용하여 산업용 제어 및 모니터링 솔루션을 제공합니다.
다음의 경우에 최적
리얼타임 프로세싱 요구 사항
산업용 모니터링 및 제어 어플리케이션
현장에서의 장기적 테스트
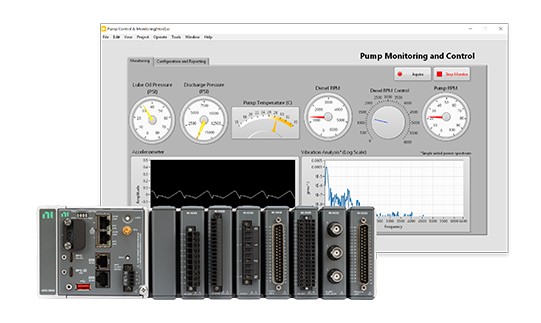
CompactRIO 시스템은 고성능 처리 기능과 센서별로 컨디셔닝된 I/O 및 긴밀하게 통합된 소프트웨어 툴체인을 제공하므로, 산업용 사물 인터넷 및 모니터링과 제어 어플리케이션에 적합합니다. 리얼타임 프로세서는 안정적이고 예측 가능한 동작을 제공하는 반면, FPGA는 고속 로직과 정확한 타이밍을 요구하는 작은 작업에서 효과적입니다.

유연한 개발 옵션
장기적인 데이터 수집
DAQ와 제어의 결합
개방적이고 보안성이 뛰어난 플랫폼

CompactRIO 하드웨어는 리얼타임 기능이 있는 센서 또는 프로토콜별 컨디셔닝 I/O 모듈을 사용하여 산업용 제어 및 모니터링 솔루션을 제공합니다.
다음의 경우에 최적
리얼타임 프로세싱 요구 사항
산업용 모니터링 및 제어 어플리케이션
현장에서의 장기적 테스트

CompactRIO 시스템에는 Linux Real-Time OS를 실행하는 프로세서가 있는 컨트롤러와 사용자 프로그래밍 가능한 FPGA가 포함된 섀시가 있습니다. 이는 NI와 타사 모두의 산업용 I/O 모듈을 지원합니다.

CompactRIO 섀시는 통합 시스템 아키텍처의 중심입니다. I/O에 직접 연결되어 각 모듈의 I/O 회로에 고성능으로 액세스하고 타이밍, 트리거링 및 동기화할 수 있습니다. 각 모듈은 버스를 통해서가 아니라 직접 FPGA에 연결되어 있으므로, 다른 컨트롤러 아키텍처와 비교하면 시스템 응답에 제어 지연 시간이 거의 없습니다.

CompactRIO 컨트롤러는 견고한 설계, 업계 표준 인증, 통합 비전 및 모션, 산업용 통신 및 HMI 기능을 갖춘 고성능 컨트롤러입니다. 이 컨트롤러에는 LabVIEW Real-Time 어플리케이션을 안정적이고 결정론적으로 실행하고 멀티레이트 제어, 실행 추적, 내장 데이터 로깅 및 주변 통신을 제공하는 프로세서가 포함되어 있습니다. CompactRIO 컨트롤러는 CompactRIO 섀시와 통합되어 제공됩니다.
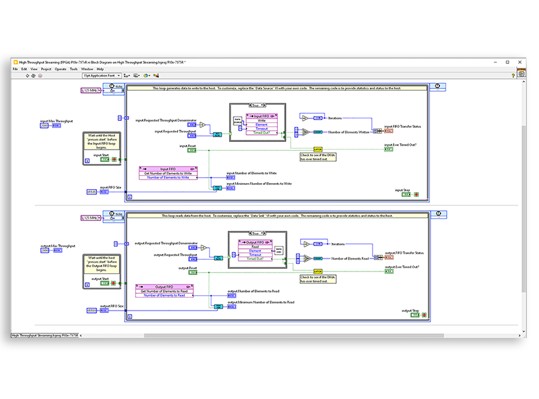
NI Linux Real-Time, LabVIEW FPGA Module 및 NI-DAQmx 드라이버를 사용하여 기존의 유형이 다른 아키텍처 프로그래밍 문제를 해결하십시오. 이 조합을 사용하면 직관적인 단일 소프트웨어 툴체인으로 프로세서와 사용자 프로그래밍 가능 FPGA를 모두 프로그래밍하여 시스템을 보다 신속하게 개발할 수 있습니다. 위험을 줄이고 생산성을 높이며 I/O 드라이버, OS 및 기타 미들웨어를 만들고 유지 관리할 필요가 없어 사용자 편의성이 높은 통합 소프트웨어를 사용하여 하위 레벨 프로그래밍 작업이 아닌 문제 해결에 집중하십시오.

하드웨어를 개봉하는 순간부터 배포 및 수명 주기 유지보수까지, NI는 신속하게 시작하고 효율적으로 운영할 수 있도록 지원합니다.
다음을 통해 문제를 극복하십시오.
수리 서비스
수명 주기 서비스
설정
교정
CompactRIO 플랫폼의 비전 기능을 통해 LabVIEW FPGA IP Builder를 사용하여 로보틱스 유도를 개발할 수 있었습니다.
Sagemcom Tunisia
엔지니어의 신호 컨디셔닝 가이드를 통해 모든 데이터 수집 시스템의 가장 중요한 구성 요소 중 하나를 살펴보십시오.
Linux® 등록 상표는 전 세계에 상표권을 보유하고 있는 Linus Torvalds와 독점 라이센스 계약을 맺고 있는 LMI의 2차 라이센스에 따라 사용되었습니다.